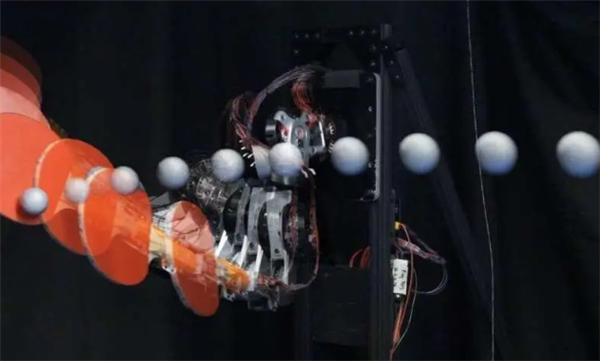
本站6月3日消息,據(jù)媒體報道,麻省理工學(xué)院仿生機器人實驗室近日在動態(tài)操控領(lǐng)域取得重大突破,其研發(fā)的乒乓球機器人系統(tǒng)展現(xiàn)出接近人類水平的精準(zhǔn)擊球能力。
該研究團隊由肯德里克·坎西奧和大衛(wèi)·阮領(lǐng)銜,他們開發(fā)的系統(tǒng)完美融合了機械臂硬件創(chuàng)新與先進控制算法。系統(tǒng)采用實驗室自主研發(fā)的高性能人形機械臂,憑借其高扭矩、低慣性的特性,能夠?qū)崿F(xiàn)毫秒級的快速響應(yīng)。
在算法層面,研究團隊突破了傳統(tǒng)分段控制的局限,創(chuàng)新性地采用全程軌跡規(guī)劃技術(shù),使機械臂能夠在整個揮拍過程中持續(xù)優(yōu)化運動路徑。
團隊構(gòu)建了由感知模塊和執(zhí)行模塊組成的完整系統(tǒng)架構(gòu)。感知模塊通過高速運動追蹤系統(tǒng)實時捕捉球體運動,執(zhí)行模塊則負(fù)責(zé)計算最優(yōu)擊球策略并精確控制機械臂動作。測試數(shù)據(jù)顯示,該系統(tǒng)能以88%的成功率精準(zhǔn)擊球,最高出球速度達11米/秒,并可實現(xiàn)多種擊球方式的靈活切換。
值得注意的是,這項研究在方法論上具有特殊價值。在當(dāng)前強化學(xué)習(xí)大行其道的背景下,研究團隊證明了傳統(tǒng)約束優(yōu)化方法在精密控制中的獨特優(yōu)勢。坎西奧表示:"我們正在探索將兩種方法優(yōu)勢互補的可能性,這可能會催生更強大的控制范式。"
自去年9月研究成果發(fā)表以來,團隊持續(xù)優(yōu)化系統(tǒng)性能。最新進展包括實現(xiàn)任意落點的精確控制,以及對球拍觸球過程的精細(xì)化調(diào)控。
未來,研究人員計劃通過加裝龍門架等結(jié)構(gòu)擴展機械臂工作空間,最終目標(biāo)是實現(xiàn)完整的人機對打能力。這一技術(shù)突破不僅限于乒乓球領(lǐng)域,其核心算法和硬件創(chuàng)新有望應(yīng)用于搜救機器人、工業(yè)自動化等需要精密動態(tài)操控的場景,為機器人技術(shù)的實際落地帶來新的可能性。
鄭重聲明:本文版權(quán)歸原作者所有,轉(zhuǎn)載文章僅為傳播更多信息之目的,如作者信息標(biāo)記有誤,請第一時間聯(lián)系我們修改或刪除,多謝。



