本站5月17日消息,當(dāng)前圍繞輔助駕駛基本分為兩條路線,第一種就是視覺(jué),典型如特斯拉,甚至砍去了除攝像頭之外的其他所有傳感器,且目前已有跟隨者。
而另一種則是以華為、理想等為代表的大多數(shù),堅(jiān)持使用以激光雷達(dá)為核心的融合感知方案。

有趣的是,小鵬汽車經(jīng)歷了從激光雷達(dá)到視覺(jué)的轉(zhuǎn)變,那么為何它要棄用激光雷達(dá)?近日,小鵬汽車自動(dòng)駕駛產(chǎn)品高級(jí)總監(jiān)袁婷婷進(jìn)行了回應(yīng)。
她直接表示:激光雷達(dá)看得遠(yuǎn)是個(gè)偽命題。
以下是她關(guān)于該論點(diǎn)的介紹:
首先激光雷達(dá)是主動(dòng)傳感器,依賴于向外發(fā)射近紅外光以及反射回波來(lái)計(jì)算 ToF(time of flight),來(lái)計(jì)算障礙物,這樣會(huì)帶來(lái)幾個(gè)缺點(diǎn)。
隨著距離增加,激光束發(fā)散角擴(kuò)大,導(dǎo)致能量密度呈平方反比衰減,在遠(yuǎn)距離測(cè)量時(shí),回波信號(hào)強(qiáng)度和點(diǎn)云密度都大幅降低。
以當(dāng)前行業(yè)領(lǐng)先水平192線激光雷達(dá)為例,200m外的物體,激光雷達(dá)可獲取信息和800萬(wàn)像素?cái)z像頭可獲取信息可以用下圖做一個(gè)對(duì)比。
而車輛需要足夠的信息來(lái)區(qū)分200m外是一個(gè)輕飄飄的塑料袋,還是一個(gè)橫行的電瓶車。
所以對(duì)于大模型方案來(lái)說(shuō),檢測(cè)遠(yuǎn)距離目標(biāo)最好的傳感器不是激光雷達(dá),而是高分辨率攝像頭。
此外她還表示,激光雷達(dá)會(huì)有多徑效應(yīng)并且?guī)蔬h(yuǎn)低于攝像頭。
作為一種主動(dòng)傳感器,激光雷達(dá)在測(cè)量遠(yuǎn)距離的復(fù)雜地形或障礙物可能發(fā)生多次反射,導(dǎo)致回波信號(hào)混疊,使得原來(lái)的信號(hào)失真,或者產(chǎn)生錯(cuò)誤,難以準(zhǔn)確識(shí)別甚至誤識(shí)別真實(shí)目標(biāo)。
同時(shí)業(yè)界主流激光雷達(dá)的處理幀率,不及我們攝像頭幀率的一半,低頻的幀率會(huì)讓遠(yuǎn)距離且高速移動(dòng)物體的識(shí)別誤差進(jìn)一步加劇。
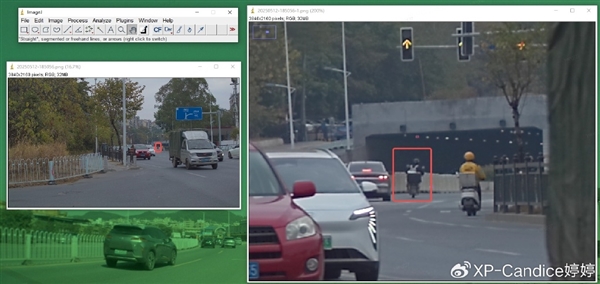
200m開(kāi)外的外賣小哥,小鵬lofic攝像頭拍攝
同時(shí),激光雷達(dá)其實(shí)對(duì)于天氣狀況非常敏感,穿透雨霧主要依靠的是毫米波雷達(dá)。
近紅外光的波長(zhǎng)短,根據(jù)波粒二象性,波長(zhǎng)越短粒子屬性越強(qiáng),衍射性越差,遇到雨雪霧等極端天氣就會(huì)在傳感器附近幾米內(nèi)形成一團(tuán)噪點(diǎn),并且不能穿透這些透明障礙物看到霧氣后面的目標(biāo),從而“致盲,而毫米波雷達(dá)波長(zhǎng)更長(zhǎng),衍射性好,雨霧特性好。
最后她總結(jié)稱,激光雷達(dá)是一個(gè)信息密度低,且容易受干擾的傳感器,并不適合作為強(qiáng)大大腦的眼睛。
鄭重聲明:本文版權(quán)歸原作者所有,轉(zhuǎn)載文章僅為傳播更多信息之目的,如作者信息標(biāo)記有誤,請(qǐng)第一時(shí)間聯(lián)系我們修改或刪除,多謝。



